RotationMatrix
用于处理非常特殊的物体和惯性坐标空间之间的旋转,这个矩阵类不是一般的变换类,我们假定这个类只包含旋转,而且是正交的
这个矩阵只包含方位的信息,并不含转换的信息
ts
import { EulerAngles } from './EulerAngles';
import { Quaternion } from './Quaternion';
import { Vector3 } from './Vector3';
export class RotationMatrix {
m11: number;
m12: number;
m13: number;
m21: number;
m22: number;
m23: number;
m31: number;
m32: number;
m33: number;
constructor(
m11?: number,
m12?: number,
m13?: number,
m21?: number,
m22?: number,
m23?: number,
m31?: number,
m32?: number,
m33?: number,
) {
this.m11 = m11;
this.m12 = m12;
this.m13 = m13;
this.m21 = m21;
this.m22 = m22;
this.m23 = m23;
this.m31 = m31;
this.m32 = m32;
this.m33 = m33;
}
// 置为单位矩阵
identity() {
this.m11 = 1;
this.m12 = 0;
this.m13 = 0;
this.m21 = 0;
this.m22 = 1;
this.m23 = 0;
this.m31 = 0;
this.m32 = 0;
this.m33 = 1;
}
// 根据指定的方位构造矩阵
setup(orientation: EulerAngles) {
const sh = Math.sin(orientation.heading);
const sp = Math.sin(orientation.pitch);
const sb = Math.sin(orientation.bank);
const ch = Math.sin(orientation.heading);
const cp = Math.sin(orientation.pitch);
const cb = Math.sin(orientation.bank);
this.m11 = ch * cb + sh * sp * sb;
this.m12 = -ch * sb + sh * sp * cb;
this.m13 = sh * cp;
this.m21 = sb * cp;
this.m22 = cb * cp;
this.m23 = -sp;
this.m31 = -sh * cb + ch * sp * sb;
this.m32 = sb * sh + ch * sp * cb;
this.m33 = ch * cp;
}
// 根据四元数构造矩阵,假设该四元数参数代表指定方向的变换
fromInertialToObjectQuaternion(q: Quaternion) {
this.m11 = 1 - 2 * (q.y * q.y + q.z * q.z);
this.m12 = 2 * (q.x * q.y + q.w * q.z);
this.m13 = 2 * (q.x * q.z - q.w * q.y);
this.m21 = 2 * (q.x * q.y - q.w * q.z);
this.m22 = 1 - 2 * (q.x * q.x + q.z * q.z);
this.m23 = 2 * (q.y * q.z + q.w * q.x);
this.m31 = 2 * (q.x * q.z + q.w * q.y);
this.m32 = 2 * (q.y * q.z - q.w * q.x);
this.m33 = 1 - 2 * (q.x * q.x + q.y * q.y);
}
// 根据物体-惯性旋转四元数构造矩阵
fromObjectToInertialQuaternion(q: Quaternion) {
this.m11 = 1 - 2 * (q.y * q.y + q.z * q.z);
this.m12 = 2 * (q.x * q.y - q.w * q.z);
this.m13 = 2 * (q.x * q.z + q.w * q.y);
this.m21 = 2 * (q.x * q.y + q.w * q.z);
this.m22 = 1 - 2 * (q.x * q.x + q.z * q.z);
this.m23 = 2 * (q.y * q.z - q.w * q.x);
this.m31 = 2 * (q.x * q.z - q.w * q.y);
this.m32 = 2 * (q.y * q.z + q.w * q.x);
this.m33 = 1 - 2 * (q.x * q.x + q.y * q.y);
}
// 执行旋转
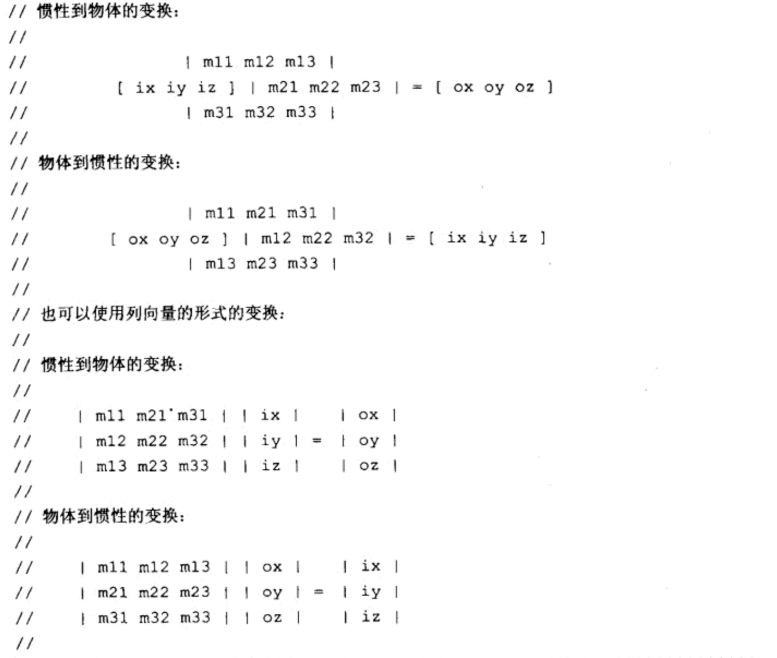
// 对向量做惯性--物体转换
inertialToObject(v: Vector3): Vector3 {
// 以“标准”方式执行矩阵乘法
return new Vector3(
this.m11 * v.x + this.m21 * v.y + this.m31 * v.z,
this.m12 * v.x + this.m22 * v.y + this.m32 * v.z,
this.m13 * v.x + this.m23 * v.y + this.m33 * v.z,
);
}
// 对向量做物体--惯性转换
objectToInertial(v: Vector3): Vector3 {
// 乘以转置
return new Vector3(
this.m11 * v.x + this.m12 * v.y + this.m13 * v.z,
this.m21 * v.x + this.m22 * v.y + this.m23 * v.z,
this.m31 * v.x + this.m32 * v.y + this.m33 * v.z,
);
}
}