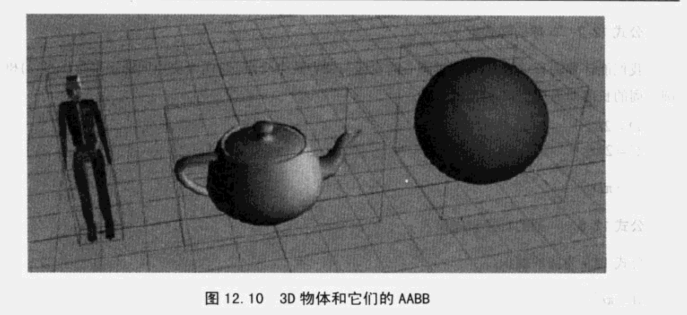
矩形边界框
用来界定物体的几何框,可以是轴对齐的,也可以是任意方向的。其中轴对齐矩形边框它的边必须是垂直与坐标轴的。
轴对齐矩形边框:axially aligned bounding box(AABB)
方向矩形边界框:oriented bounding box(OBB)
其中AABB是本文讨论的重点
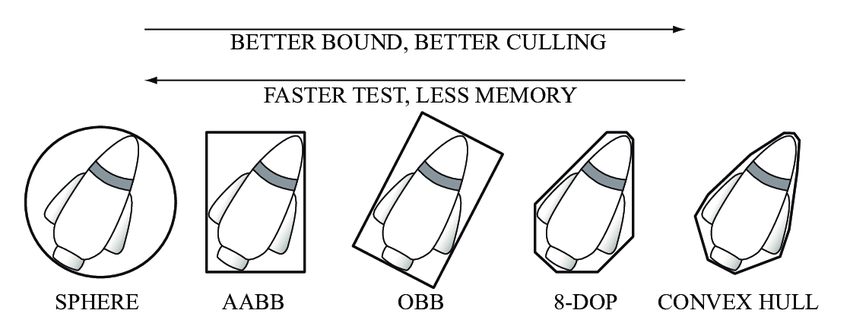
几种包围体的区别:
表达方式
边界框中任意一点p(x, y, z),都满足以下不等式
特别重要的两个点pmin、pmax
中心点c为
向量s为“尺寸向量”,表示从pmin指向pmax,则有
向量r为“半径向量”,表示从中心点c指向pmax,则有
可知,我们只需要知道边界框的最小点pmin和最大点pmax就可以计算出c、s、r
最小点、最大点计算规则
首先将最小点pmin设置为number类型的最小负值,最大点pmax设置为number类型的最大正值
后遍历构成几何图元的点集,判断出最大值再赋值
AABB与边界球
边界球是将结合图元完全包裹的三维球体,大多数情况下边界球的体积是大于边界框的体积的。在编程上,计算边界框很容易实现,但是计算单位球比较困难
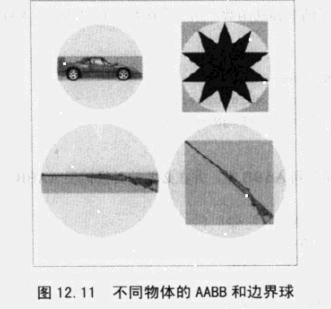
从图中可知,边界框的大小对几何图元的方向很敏感,但是边界球却相反。
变换AABB
物体在虚拟世界中的变换时,我们有两种方式来确定AABB
- 根据变换后的物体重新计算AABB
- 随着物体一起变换原有的AABB,这样得到的AABB并不一定是轴对齐的,也不一定是盒装的(如果物体发生了扭曲)
其中第一种方式需要重新遍历整个点集合,比较得出最大值和最小值,效率相对较慢,但是编程实现简单;第二种方式只需要关注边界框的8个点即可,更加简洁、快速,但是编程实现相对复杂
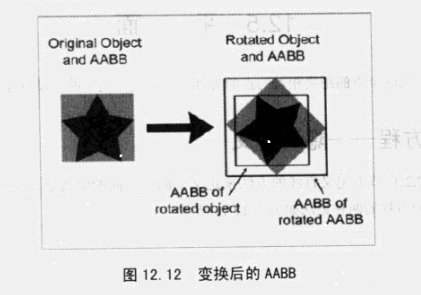
原AABB、变换后的AABB、基于变换后的AABB重新计算出的AABB
变换思路??