欧拉角
欧拉角能描述任意旋转,也就是说任意旋转都可以按照顺序,做三个欧拉角的旋转而得到。
欧拉角的基本思想是将绕三个相互垂直的轴做三次旋转,下次的旋转总是与上次旋转后的轴有关,这样保证了旋转之间的联系,联想嵌套坐标系
这也是为什么第一次旋转时是绕世界坐标系的轴
要指出,我们平时说的欧拉角其实还可以细分为经典欧拉角(Euler-angles)和泰特布莱恩角(Tait-Bryan-angles),这两种方法都利用了笛卡尔坐标系的三轴作为旋转轴,主要区别在于选取顺序。
欧拉角又可以根据物体坐标轴是否静止分为静态和动态:
静态: 即绕
世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静止,所以称为静态,此时各个变换顺序的旋转矩阵是左乘的动态: 即绕
物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态,此时各个变换顺序的旋转矩阵是右乘的
欧拉角选取顺序有以下6种
可以简化了理解为绕a轴旋转,再绕旋转一次后的b轴旋转,再绕旋转两次后的a轴旋转
泰特布莱恩角选取顺序有以下6种
泰特-布莱恩角(Tait–Bryan angles)又常称为:roll-偏航角、pitch-俯仰角、yaw-翻滚角
WARNING
heading-pitch-bank系统等价于roll-pitch-yaw系统,注意两者的排列顺序,roll类似bank,yaw类似heading
例如:heading20度,pitch30度,bank40度 等价于 yaw20度,pitch30度,roll40度
heading-pitch-bank思想是让物体开始于标准"方位"--物体坐标系与惯性坐标系坐标轴对齐,在标准方位上进行heading、pitch、bank以达到我们期望的方位
本文以经典欧拉角(Euler-angles)以[z,x,z]顺序旋转
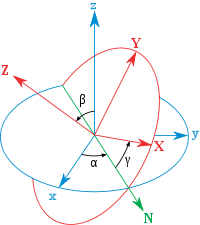
图中有两组坐标:
- [x, y, z]为全局坐标,保持不动
- [X, Y, Z]为局部坐标,随着物体移动
我们取α、β、γ三个角,分别代表
α为x轴与旋转一次后的x轴的夹角,即为绕z轴旋转的角度β为旋转一次后的x轴与旋转三次后的x轴的夹角,即为绕x轴旋转的角度γ为z轴与旋转一次后的z轴的夹角,即为绕z轴旋转的角度
得到[z,x,z]顺序下的组合矩阵为
INFO
- 任意三个轴都可以作为旋转轴,不一定是笛卡尔坐标轴,但是笛卡尔坐标轴更有意义
- 旋转可以以任意顺序进行,最终都会得到相同的效果
- 我们只需要知道
三个旋转角度便可以对物体进行旋转
优点
- 占用空间小,只需要知道三个角度便可以进行旋转
- 更简单,更符合人类的思维,通过旋转角度更加具象的描述了旋转
- 表达方式简洁
- 任意三个欧拉角度都是有意义的
缺点
- 有歧义的,给定方位的表述不唯一,会存在多个欧拉角对应一个方位,又称为别名现象
经典欧拉角(Euler-angles),顺序为[z,x,z]示例
泰特布莱恩角(Tait-Bryan-angles),顺序为[z,x,y]示例
别名问题
由于一个旋转对应多个欧拉角,考虑以下两个问题
- 将一个角度加上360度的倍数,尽管数值改变了,但是方位并没有改变,这是最简单的别名问题
解决上述问题,我们只需要对欧拉角的数值进行限制即可
如果patch等于90度或-90度,则bank为0
- 三个角度不相互独立,任意一个角度都可以通过另外一个欧拉角变换而来
例如:pitch135度等价于heading180度,pitch45度,bank180度
欧拉角最著名的别名问题是:先heading45度,再pitch90度与先pitch90度,再yaw45度的结果是相同的
更一般来说,在进行旋转时,只要欧拉角中间的旋转角度为
便会存在第一次旋转与第三次旋转绕相同的轴,则会丢失一个维度,只能绕竖直轴旋转。这种现象又称为万向锁。
旋转过程中万向锁问题时,会出现旋转不自然、抖动、突然飘起来像是"挂"起来一样
添加范围限制能解决部分别名问题,但是无法解决万向锁问题,万向锁问题可以通过选择合理的旋转顺序或者四元数解决
总结
- 欧拉角使用三个旋转量保存方位,
占用空间更少 - 在多数情况下,欧拉角更加
易于使用 任意3个角度构成的欧拉角都有意义- 欧拉角存在别名问题,这与
角度的周期性和旋转的不独立性有关 - 限制欧拉角值的范围可以解决许多基本问题
- 如果patch等于正负90度时,会导致万向锁问题,可以通过选择
合理的旋转顺序或者四元数解决
参考:
【1】欧拉角
【2】环架锁定
【3】欧拉角
【4】马同学图解数学