三角形
三角形在计算机图形学中应用广泛,复杂的3D表面都是用一个个三角形组成的网格模拟的。
基本性质
对于任意三角形
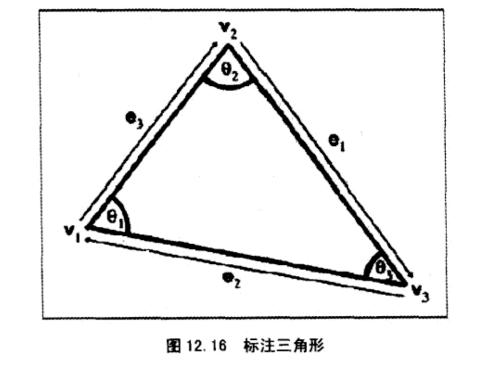
正弦公式
R为三角形外接圆的半径
余弦公式
周长
三个边相加即三角形的周长
面积
如果知道三角形的高为h,底边长度为b,那么有
如果只知道三角形的三个边长,而不知道高度,那么可知
假设s为周长的一半
INFO
这称为海伦公式,在3D中使用非常方便
但是在3D中经常只知道点对应的笛卡尔坐标,当然也可以通过计算出边长再带入海伦公式计算面积,但是为了避免复杂计算,我们可以通过以下方式计算
基本思想是:每个向量与x轴围成直角梯形的“有符号”面积之和,如果边的端点是从左到右则面积为正,反之则面积为负
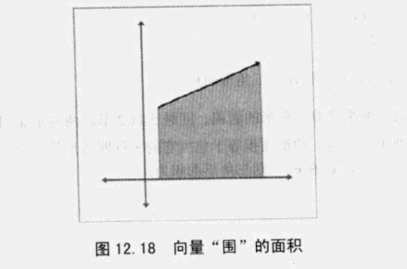
INFO
上述是y坐标平移y3后简化过的公式,因为平移并不会改变三角形的面积
这个思想同样适用于多边形
叉乘计算,我们已经知道叉乘的几何意义是向量围成的平行四边形的面积,那么它的一半也即是三角形的面积
其中e1、e2是三角形的任意两个边向量
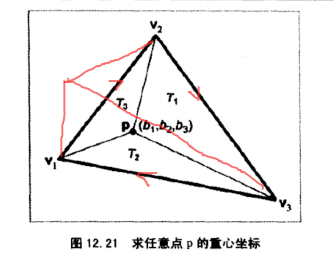
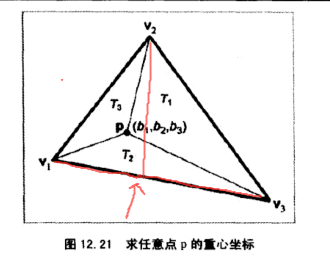
重心坐标空间
在标准3D空间中平移和转换任意方向的三角形是很复杂的,为了降低计算的复杂度,我们引入一个坐标空间,这个坐标空间与三角形的点有关,称这个空间为重心坐标空间,又称为面积坐标。重心坐标是齐次坐标(投影坐标)的一种。
重心坐标空间与标准3D坐标之间的转换规则:
而且满足
其中b1、b2、b3分别表示v1、v2、v3对该点的权重
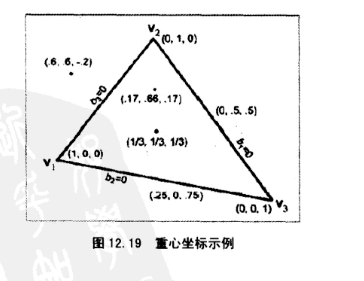
在重心坐标空间中我们用3个变量表示一个2D坐标,但是我们已知b1+b2+b3=1,其实只需要知道两个值便可以计算出另外一个坐标,因此它有2个自由度
2D
- 已知重心坐标空间下的坐标,计算标准3D坐标的坐标
只需要三角形的三个点带入即可转换为标准3D坐标
- 已知标准3D坐标的坐标,计算重心坐标空间下的坐标
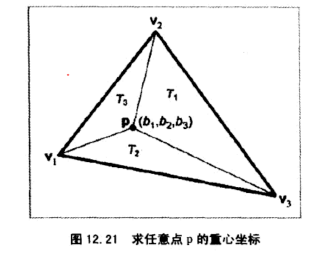
我们的目标是计算出b1、b2、b3,根据转化公式有
计算出
根据面积公式,最终简化为
- 点p在三角形外部也适用,子三角形的点是顺时针时,面积为正,反之则为负
- 子三角形的三个点共线(即在三角形边上),则对应的重力空间坐标为0
3D
3D中任意点的坐标转化为重力空间下的坐标是复杂的,原因有
- 在3D中根据点坐标可以列出4个方程,但是要计算出3个值
- 任意点的坐标并不一定在三角形平面上,这是重力坐标没有意义
我们可以通过投影将3D问题转化为2D问题,抛弃3D坐标中的一个自由度,那么如何选择需要抛弃的自由度呢?
首先计算出三角形平面的法向量,并确定法向量坐标中绝对值最大的坐标,例如:三角形所在平面的法向量为[0, 0, 1],那么则抛弃z轴上的自由度,并将三角形投影到xy平面上
代码示例:
import { Vector3, Vector3Helper } from './Vector3';
/**
* 通过投影减少自由度到2D的方式将3D坐标转化为重力空间坐标
*
* @param v 按照顺时针顺序排列好的三角形向量
* @param p 3D空间中任意一点
* @return b 转换后的重力空间下的坐标
*/
export function computeBarycentricCoords3d(
v: [Vector3, Vector3, Vector3],
p: Vector3,
): [number, number, number] | undefined {
// 计算两个边向量,按顺时针方向
const d1 = v[1].subtract(v[0]);
const d2 = v[2].subtract(v[1]);
// 计算出三角形平面的法向量
// 不需要标准化
const n = Vector3Helper.crossProduct(d1, d2);
// 选择投影平面
const max = Math.max(Math.abs(n.x), Math.abs(n.y), Math.abs(n.z));
// 计算出子式
let u1, u2, u3, u4;
let v1, v2, v3, v4;
switch (max) {
case Math.abs(n.x):
// 抛弃x,投影到yz平面
u1 = v[0].y - v[2].y;
u2 = v[1].y - v[2].y;
u3 = p.y - v[0].y;
u4 = p.y - v[2].y;
v1 = v[0].z - v[2].z;
v2 = v[1].z - v[2].z;
v3 = p.z - v[0].z;
v4 = p.z - v[2].z;
break;
case Math.abs(n.y):
// 抛弃y,投影到xz平面
u1 = v[0].z - v[2].z;
u2 = v[1].z - v[2].z;
u3 = p.z - v[0].z;
u4 = p.z - v[2].z;
v1 = v[0].x - v[2].x;
v2 = v[1].x - v[2].x;
v3 = p.x - v[0].x;
v4 = p.x - v[2].x;
break;
case Math.abs(n.z):
// 抛弃z,投影到xy平面
u1 = v[0].x - v[2].x;
u2 = v[1].x - v[2].x;
u3 = p.x - v[0].x;
u4 = p.x - v[2].x;
v1 = v[0].y - v[2].y;
v2 = v[1].y - v[2].y;
v3 = p.y - v[0].y;
v4 = p.y - v[2].y;
break;
}
const denom = v1 * u2 - v2 * u1;
if (denom !== 0) {
const oneOverDenom = 1 / denom;
const b1 = (v4 * u2 - v2 * u4) * oneOverDenom;
const b2 = (v1 * u3 - v3 * u1) * oneOverDenom;
const b3 = 1 - b1 - b2;
return [b1, b2, b3];
}
}另一种方式是根据叉乘的几何意义计算各个子三角形的面积值,再进行计算。但是这样存在一个缺点:叉乘的大小永远是正的,我们可以通过点乘来解决这个问题
首先我们假设向量c为三角形任意两条边的叉乘,它的长度是三角形面积的2倍,引入一个单位向量n,与向量c保持平行,那么
将上述面积再除以2,就得到的三角形面积的“有符号”值,利用这个思想,我们依次计算出各个子三角形的面积值
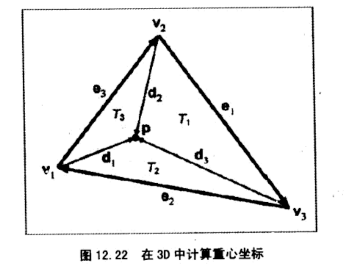
取e1、e2计算出单位向量n
则计算出对应的权重为
不必标准化n,分母为n·n
特殊点
重心
三角形的最佳平衡点,每条边中线的交叉点为重心,又称为质心
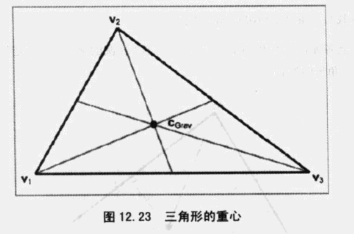
标准3D坐标系下的计算公式
对应的重心坐标系下
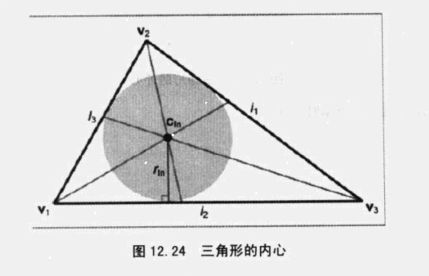
内心
到三条边距离都相等的点,也是三角形内切圆的圆心,也是3个角平分线的交点
标准3D坐标系下的计算公式
对应的重心坐标系下
内切圆的半径可以通过面积除以周长取得
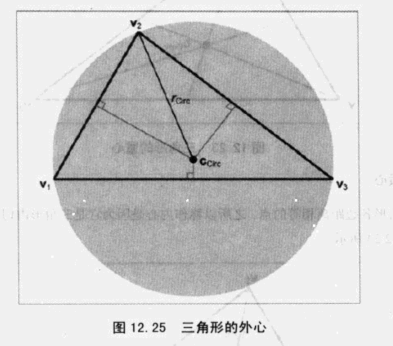
外心
外心是到各顶点距离相等的点
首先给出以下子式
标准3D坐标系下的计算公式
对应的重心坐标系下
外接圆的半径为
参考:
【1】三角学#标准恒等式
【2】海伦公式
【3】重心坐标